Crane Rigging Grabber Help/Support
-
Good morning everyone,
I am working on a project for a client which involves a crane, more specifically a grabber crane used on docks or building sites picking up materials like gravel.
I have tried along with Matt (Matt Rittman) but we could only get so far.
I will try and explain and clear as I can with text and the images attached.
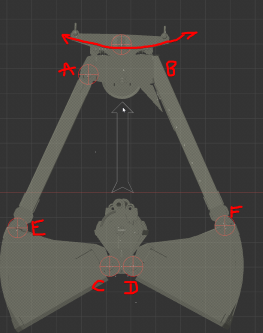
One arm (b) is fixed to the top part.
The other arm (a) is on a swivel so it can rotate (on the B axis in c4d) allow for the arm to widen and close.
Points C & D remain fixed but of course can rotate to allow for the grabbers to swivel. Points E & F are fixed but like the above can swivel or turn within themselves.
The centre unit is attached to cables which when tighten lift up the two grabbers thus opening and closing it.I hope the images and videos are helpful. Me and Matt got so far but cannot seem to go further. Perhaps someone with a more engineering or technical background in rigging may be of help. I can't share the official model but I blocked it out and have attached what Matt I have gotten to along with a rig I tried with IK's. I can't seem ot upload .gifs or mp4s to show process but could discord or share to anyone who may have any solutions.
Thanks!
240313 - Kraan Test - Protection Tag.c4d -
Hi brown-plastic,
Would that follow your idea?
I have placed the two states of your ig in the "background", so you can see where the Nulls are moving.
The main object to move the whole rig is marked as "Move Me!"
Cheers
-
Morning Dr Sassi,
Firstly thanks for your response. I have heard very good things about your support. I have opened your file. It looks as though this will work no doubt. I have attached the file again where I have placed my geo under the nulls (which I think is correct) so they inherit the parent. Is this how I would go about using your rig? cv4_2024_drs_24_cagg_02.c4d
I continued yesterday on my own as I only saw your message this morning and have made some positive progress. My grabber is now attached with a spring so I can make it land on a collider object (the uneven surface/floor). By adjusting the rest length I can now make my go up and down.
It is swinging quite a lot which I do not want as the object is extremely heavy in real life and would not swing like this. Maybe I need to adjust my stability and stiffness in the spring? I have also noticed when my grabber is closed it has not appeared to have picked up very much of the spheres...perhaps I need to adjust my rigid body settings?
I have put the files on this link - https://videos-gifs-andrew.framer.website/ -
Hi brown-plastic,
Thanks so much for the feedback file. Yes, that looks good. It was nicely done.
Grabbers 1 and 2 have no space for gravel. I quickly set this space up, and it's demo quality.
I would not place springs there. I would encourage preparing the gravel so that there is a volume with static gravel and a smaller space that is just a little bit more than the Grabber can take at that time. Just a thought.
BTW, images please as Instagram or Imgur., Files if larger than 1MB, please Dropbox, Google, Adobe, Apple, or Wetransfer. For security reasons, I don't touch other URLs here. Thank you.
My tip: Go through this series when you have some time. Noseman asked us to throw him complicated mechanical rigging problems, and he solved them all very well. If you have that knowledge in your toolbox, things will get easier.
It is a four-part series.
https://www.youtube.com/watch?v=5dNmL-NpU_wAs a side note, please say hello to Matt from me. Thank you!
-
Thanks for you feedback. I have found a solution now whereby my model is rigged with the spring (although you suggested not too) but my geometry (the rigid bodies) do not seem to want to go inside my bucket / shell still. Must be to do with the way I have setup my collider tag. I have asked on the discord forum perhaps someone may have some feedback. https://drive.google.com/drive/folders/1AgoMKeTqLRYzLZGe2lzvCzMEZIV_34aW?usp=sharing
Very appreciative of your input and the swift replies from Maxon! As for the Noseman tuts they were very interesting, in particular the robotic arm. If only he did one on my crane earlier aha!
As for Matt I shall let him know you say hello!
-
Hi brown-plastic,
Thanks for the gif.
I grew up in a construction company and had to work to finance my study time. Hence, I'm familiar with that kind of machinery, having spent much in that area back then.
The GIF shows me that it was pulled up before it could close; it had to stay longer on the floor. I assume that is your impression as well.
Here is an animation sketch of how I would do it, and yes, it is a mixed Dynamic with a "roto" like animation combination. I left the Grabber preparation in the file so you can check how far a complete sim would get you. It took me a few minutes to manually match-move the grabber. I have no idea how long your animation will be, so I can't tell if that is something even remotely possible.
If not, I hope it shows that I get your target.I know that the typical idea is to use dynamic/simulation to do that, but it has no logical understanding of the situation in front of it; it only understands what is defined in the simulation as "forces", etc.
Cheers
-
Hi brown-plastic,
Finally, it's Friday evening, so some time and peace to review ideas with fresh eyes.
From your image, I get the impression that you would like to have some control over how the Grabber works, like in the post above.
With this in mind, I wondered how it would work when the mechanic is more based on the idea of being art direct-able, meaning the Grabber's "edges" are the point of interest, and anything moves from there.
As often in 3D animation, reality, and logic have very little value here.Please have a look here first, so it is clear what parts I describe (60 seconds)
https://stcineversityprod02.blob.core.windows.net/$web/Cineversity_Forum_Support/2024_Clips_DRS/20240315_Grabber.mp4The only thing that matters is the two spheres; from there, all other parts work as described above. A solution needs to be found to keep the "opener" part straight to the two Grabbers: always point toward the middle of the two spheres. Half the angle of the joint, or 50% aim with two targets, etc.
What I try to communicate here is more about the simplicity of the setup. Any animation moving over the ground (gravel), even on different levels, can be animated, and everything else follows.
Sketch
CV4_2024_drs_24_CAgg_21.c4dEnjoy your weekend
-
P.S.: I couldn't help it the "center" mechanic is included.
-
Morning Dr Sassi,
Thanks a bunch for the extensive feedback and suggestions. You summed it up very well here 'As often in 3D animation, reality, and logic have very little value here.'
I have taken a look at the last file and certainly think this will be a very handy method for a more art direct-able method. I am now thinking about how I can attach my geometry to your rig weight best practice.
In my head I could simply place my geo underneath the corresponding joints. Is that the case or is there a better method with constraints for example?
My model will need to also try and match the corresponding lengths of the joints to mimic the same effect, is there any good solution to that? Should I scale my model down for example to match the rig? In the same google drive link I sent earlier I have a little screen capture of how I think it should work...
Once again thanks for solid advice. Let me know your thoughts :)!
Andrew
-
Hi Andrew,
There are four main options to do it.
I have called them Object, Child Constrain, and Weight here, and I'm sure there are a dozen other names available.
The key idea here is, first of all, what fits well into your comfort zone.
I think there is no "best practice" from someone else; it must fit your idea of working. The more you explore, the more options might appear to do the same thing (result-wise). Best practice is, from my point of view, subjective. If one knows only one option, then this is their best practice?The question is, how do you find what fits?
There is often a split between rigging and animating in Character Animation, especially in studio setups. The one rigging things should do anything that keeps the animator focused on the art of expression, not the art of selecting and moving.
However, if you need the rig only for a single short take, optimizing it would be a waste of time. Therefore, the rigging should be more comfortable.
If the parts of the character (including mechanical) are not final, and the art director or client likes to change things, a very integrated rig might be an obstacle. If the exchange is easy, joints and character are not one large hierarchy, and they have many dependencies on each other (both ways), then the rig with the easiest way to exchange parts will win.
If your character has to move along a larger pipeline or to different apps, then simplicity and standard tools are key.Yes, I do not tell you what to do or what is best, as this would go against the idea of finding what is best for you and in which circumstances.
You will find a favorite among the four standards and perhaps even mix a new one. I'm sure you will have minimal problems finding what is needed, and then it is yours, not someone else's favorite.(Of course, Joints have some advantages over other skeleton hierarchies.)
One tip: Always follow the information. With rigs, the Axis of an object might be important to place wisely.

I hope that helps.
My best wishes for your project